
U of T researchers are finding new ways for civil and mineral engineers to use drones
Unmanned aerial vehicles (UAVs), or drones operating in the workplace is the future. In some ways, the work environment is already changing in ways unimaginable just 10 years ago. At the University of Toronto, Department of Civil & Mineral Engineering, there are several professors and students developing innovative applications for drones. Drones could be deployed to aid courier deliveries; aid management of construction projects, assess the integrity of concrete structures, and optimize aspects of open-pit mining.
Online shopping has been growing in popularity due to its ease of use and convenience. For companies in this industry, cost-efficient shipping is an absolute necessity when there are high volumes of items to move. Minimizing the disruptions to traffic and the movement of people is important in dense urban areas like the Greater Toronto Area. It’s a problem Professor Matt Roorda and Paul Deng (CIV MASc candidate) are tackling. Their project involves using drones to assist with multiple deliveries made by trucks.
Picture this: a delivery truck drives a route while several drones pick up packages from the truck, deliver them and return to the truck to pick up and deliver more packages, all without the truck needing to stop. It’s an ideal, but highly complex scenario.
Deng is currently working to solve the vehicle routing problem (VRP) by mathematically optimizing the route planning process. The ultimate goal of Deng’s research is to find a heuristic solution – one which finds the optimal balance between cost, distance travelled, and time for delivery.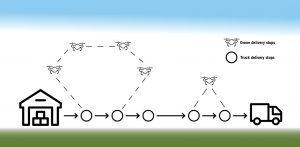
Solving the VRP incorporating drone technology has several benefits such as more efficient deliveries, but one of the most significant effects is on traffic congestion in cities. Though illegal in many cities, issues persist with delivery trucks parked in bike lanes and blocking lanes reserved for rush-hour traffic. This project would enable delivery trucks to continue along their route without needing to park.
While stories about drone delivery have been appearing increasingly in the news, drone use is appearing in less mentioned industries as well. In the construction industry, automation is all around but not always obvious. In factories and warehouses the manufacture of materials and assembly of building components takes advantage of high tech processes like using robots for automation and precision. Construction environments, however, pose significant challenges to automation: they are busy, exposed to the elements, and are constantly changing, with multiple crews working at different times in different places, creating both logistical and safety challenges. Construction managers need to keep the project moving forward by updating the project plan, which has seen very little in terms of leveraging newer technologies. Professor Brenda McCabe and her team are looking to address this.
This project started four years ago with assistance from Hesam Hamledari (CIV MASc 1T6). Schedule updating is a time consuming but ultimately necessary task related to managing a construction site. McCabe came up with an idea to innovate the process of progress analysis and data capture with a drone. UAVs can be used during off-hours to capture images that are then analyzed and used to assess construction progress. First, the project manager identifies which locations and which construction processes (i.e., framing, electrical, painting, etc.) need to be inspected. At a pre-determined time, the UAVs follow an efficient path based on a 3D building informational model (BIM). UAVs take photos along their scheduled paths and download the images to a computer. Though research is still in progress, the concept is that a series of algorithms will be used to extract critical information from the images about the progress of work, which is in turn used to automatically update the project schedule with little or no human intervention.
The most significant challenge for this project right now is the need for a reliable indoor navigational system. One idea is to incorporate AprilTags (similar to QR codes), which are directionally associated, interfaced with the BIM, and placed strategically to guide the UAV through the site. The incorporation of UAVs into the process of data capture and progress analysis is part of the growing trend towards automation for efficiency. By optimizing this process, McCabe and her team are seeking to significantly improve the scheduling ability of project managers.
Inspection of structures located in hazardous environments is a challenging problem. Professors Doug Hooton and Karl Peterson are in the early stages of developing a multi-drone, fully-automated monitoring solution for industrial sites, specifically decommissioned nuclear plants. The goal is to create a more efficient way to monitor the integrity of concrete structures without exposing inspectors to radiation, while also saving time and money.
One of the project’s objectives, which is similar to one of the challenges McCabe faces, is to develop methods to localize drones with high accuracy indoors and outdoors, and in cluttered industrial spaces. In outdoor applications, the drones encounter variable wind and weather conditions and must compensate to provide a stable platform. Hooton and Peterson intend to use a combination of GPS and a low energy, short-range, high-bandwidth radio technology called ultra-wide band (UWB). A second challenge is to adapt or develop lightweight sensors to assess structural integrity of concrete structures with capability to detect cracks, moisture, and thermal leakage in the concrete. This may be a challenge due to the weight of the sensors and battery constraints of both the UAV and the attached sensors.
Professor Kamran Esmaeili is also looking for ways to increase efficiency and safety using drones. Esmaeili’s project is focused on using drones to collect data that can be used to optimize part of the mining process; specifically, data acquisition from the drill and blast process, blasted muck piles, pit wall and heap leach mapping and monitoring. His guiding question is: ‘How can drone technology be used as a flying lab to collect data useful for mining optimization?’
With his research team of Thomas Bamford (CIV PhD Candidate, MIN 1T4+PEY), Filip Medinac (CIV MASc Candidate, MIN 1T2) and Mingliang Tang (CIV MASc Candidate, MIN 1T8), and using a DJI Matrice 600 Pro drone with multiple attached sensors (photogrammetry and thermal cameras, LiDAR), they are developing solutions for real-time, on-demand, high-resolution data acquisition and decision making. With Esmaeili’s work, localization isn’t a problem. He’s able to use GPS satellites to orient the drone because the focus is applications in open pit mines. However, he’s already thinking about moving this technology into underground mines and the potential challenges this brings. Since underground mines are GPS denied zones (since they lack sufficient satellite coverage), he has some ideas on how to localize the drones. In particular, using laser or sonar sensors might address that problem.
Each of the projects discussed explores some of the applications that may be possible in the future. Engineers with the Department of Civil & Mineral Engineering have partnered with Angela Schoellig (University of Toronto Institute for Aerospace Studies) to address some of the challenges related specifically to drone technology and capabilities.
Drones are changing our world, affecting the way we live and work. They have immense potential to create safer and more efficient work environments. There are still limitations, the most significant being battery life and federal regulations. As drones become more sophisticated and as aviation regulations are revised, it is likely that we will see more engineering applications for UAVs.